alpin-ingenieur
Stammuser
- Registriert
- 26 Juni 2012
- Beiträge
- 461
Hallo zusammen ") In den nächsten Monaten möchte ich euch die Faszination der Pistenpräparationsfahrzeuge aus dem Hause Kässbohrer ein wenig näher bringen und über den aktuellen Stand meines Projekts berichten
In den nächsten Monaten möchte ich euch die Faszination der Pistenpräparationsfahrzeuge aus dem Hause Kässbohrer ein wenig näher bringen und über den aktuellen Stand meines Projekts berichten
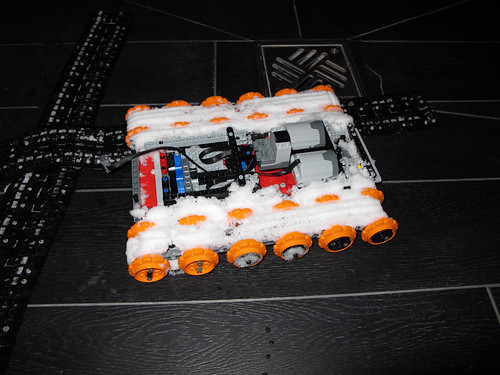
Mein Ziel und Kindheitstraum ist es, ein voll funktionsfähiges, möglichst originalgetreues Modell eines Pistenbullys 600w polar im Maßstab 1:12 aus Lego Technic zu bauen. Und um den hier geht es:

(Quelle: http://www.documentalizados.host56.com/wp-content/uploads/2011/01/bully_1.jpg)
Der Maßstab 1:12 ist bewusst gewählt - gängig und ausreichend groß um möglichst viele Lego-Bauteile von verwenden zu können. Außerdem bin ich ja schon groß und das Ding darf schon ein bisschen was können

(Quelle: http://www.pistenbully.it/uploads/tx_z7productpresentation/PB_600_3AMotor_01.jpg)
Mal umgerechnet sind das:
Gesamtlänge: 76cm / 95 LE
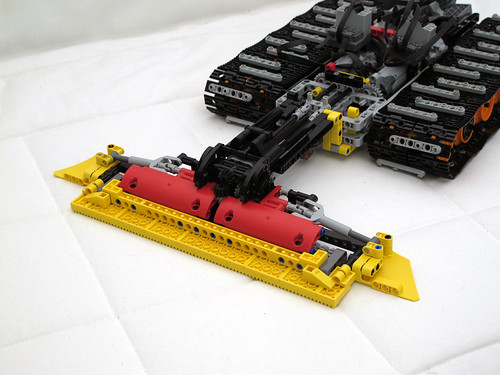
Gesamtbreite über Räumschild und Fräse: 46cm / 58 LE
Breite über Kette: 35cm / 45 LE
Gesamthöhe: 27cm / 34 LE
Bodenfreiheit: 3cm / 4 LE
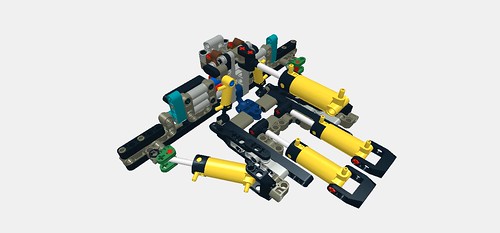
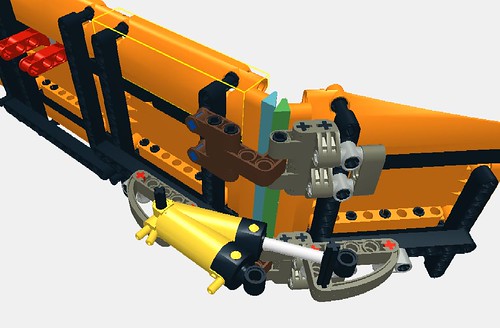
Antrieb über zwei XL-Motoren, verbunden über ein Heavy-Duty-Differential

(Quelle: s.o.)
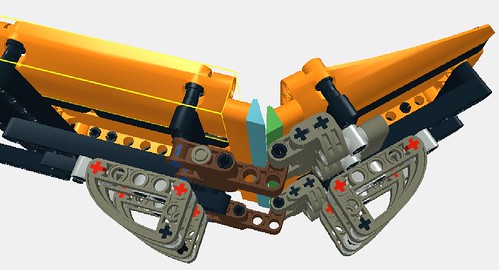
und ein Adder-Subtractor-Getriebe

(Quelle: s.o.)
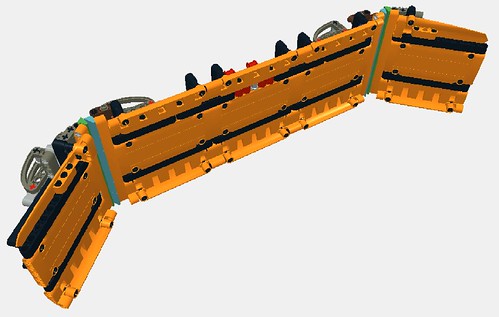
Vorerst wird noch mit dem SR 3D Builder gebaut. Hat für mich den Vorteil, bauen und entwickeln zu können, ohne dabei erstmal einen gigantischen Schwung an "neuen", noppenlosen Teilen kaufen zu müssen. Ich werde nachher ein paar Bilder vom Baufortschritt meiner diversen Ideen hochladen
So. Feierabend. Ab nach Hause
Cheers,
Boris
In den nächsten Monaten möchte ich euch die Faszination der Pistenpräparationsfahrzeuge aus dem Hause Kässbohrer ein wenig näher bringen und über den aktuellen Stand meines Projekts berichten Mein Ziel und Kindheitstraum ist es, ein voll funktionsfähiges, möglichst originalgetreues Modell eines Pistenbullys 600w polar im Maßstab 1:12 aus Lego Technic zu bauen. Und um den hier geht es:
(Quelle: http://www.documentalizados.host56.com/wp-content/uploads/2011/01/bully_1.jpg)
Der Maßstab 1:12 ist bewusst gewählt - gängig und ausreichend groß um möglichst viele Lego-Bauteile von verwenden zu können. Außerdem bin ich ja schon groß und das Ding darf schon ein bisschen was können
(Quelle: http://www.pistenbully.it/uploads/tx_z7productpresentation/PB_600_3AMotor_01.jpg)
Mal umgerechnet sind das:
Gesamtlänge: 76cm / 95 LE
Gesamtbreite über Räumschild und Fräse: 46cm / 58 LE
Breite über Kette: 35cm / 45 LE
Gesamthöhe: 27cm / 34 LE
Bodenfreiheit: 3cm / 4 LE
Antrieb über zwei XL-Motoren, verbunden über ein Heavy-Duty-Differential
(Quelle: s.o.)
und ein Adder-Subtractor-Getriebe
(Quelle: s.o.)
Vorerst wird noch mit dem SR 3D Builder gebaut. Hat für mich den Vorteil, bauen und entwickeln zu können, ohne dabei erstmal einen gigantischen Schwung an "neuen", noppenlosen Teilen kaufen zu müssen. Ich werde nachher ein paar Bilder vom Baufortschritt meiner diversen Ideen hochladen
So. Feierabend. Ab nach Hause
Cheers,
Boris






 leeping: Aber Stevee, du hast es verdient, dass ich dir noch auf deinen langen Eintrag antworte
leeping: Aber Stevee, du hast es verdient, dass ich dir noch auf deinen langen Eintrag antworte